
После долгова перерыва продолжаю выкладывать информацию о сборке 3D принтера Prusa i2. И в этот раз подключим всю электронику 3D принтера.
Как и раньше смотрите видео или читайте и смотрите фото.
Вначале необходимо залудить контакты на нагревательном столе для припаивания проводов питания.
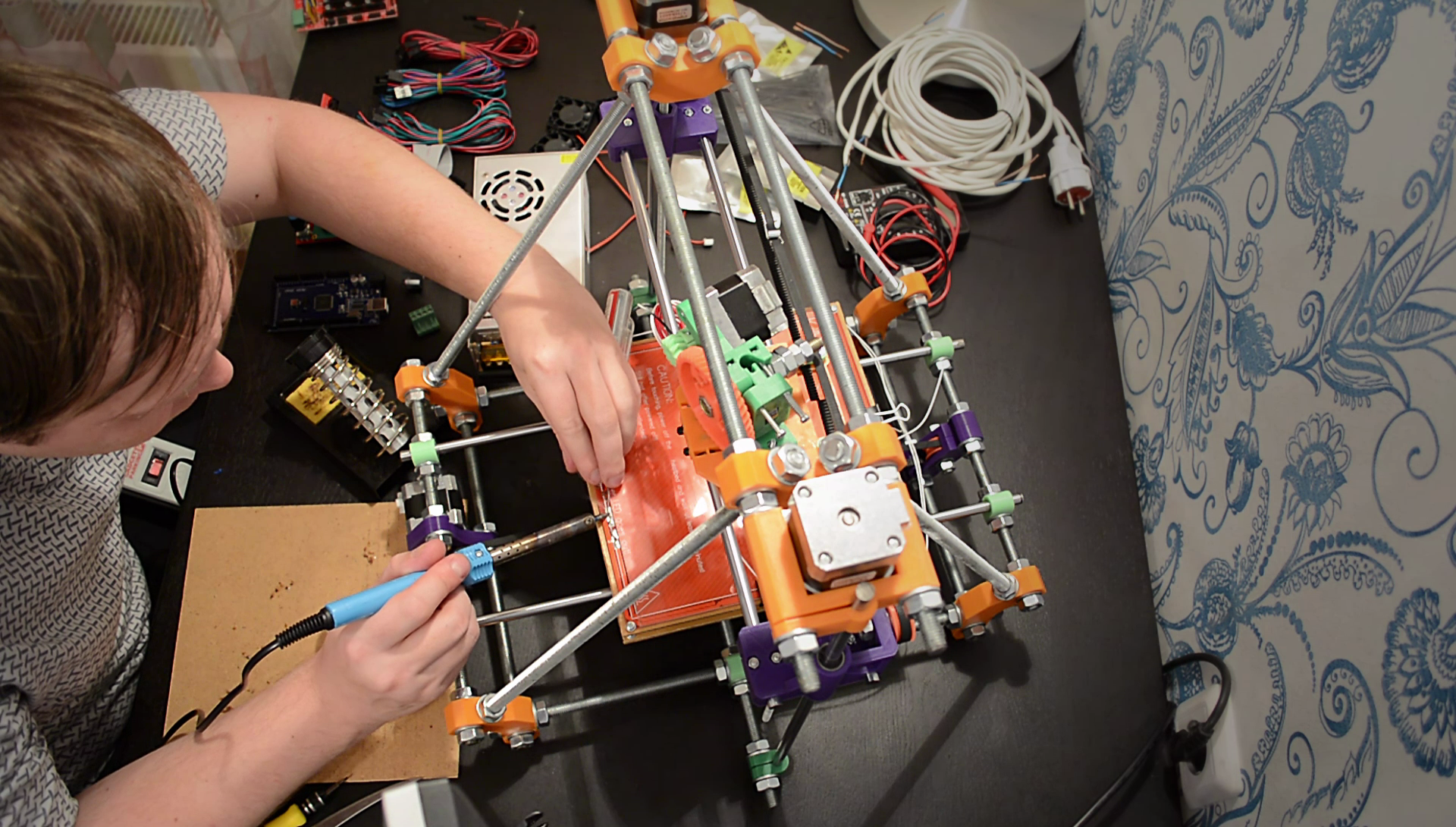
Затем припаиваем провода. Так как у меня стол будет подключен к 12 вольтам, плюс припаиваем к первому контакту, а минус ко второму и третьему. Провод должен быть медный и хорошего сечения, иначе если взять тонкий провод он будет сильно греться, а стол нагреваться очень медленно. Залуживаем провода и припаиваем.
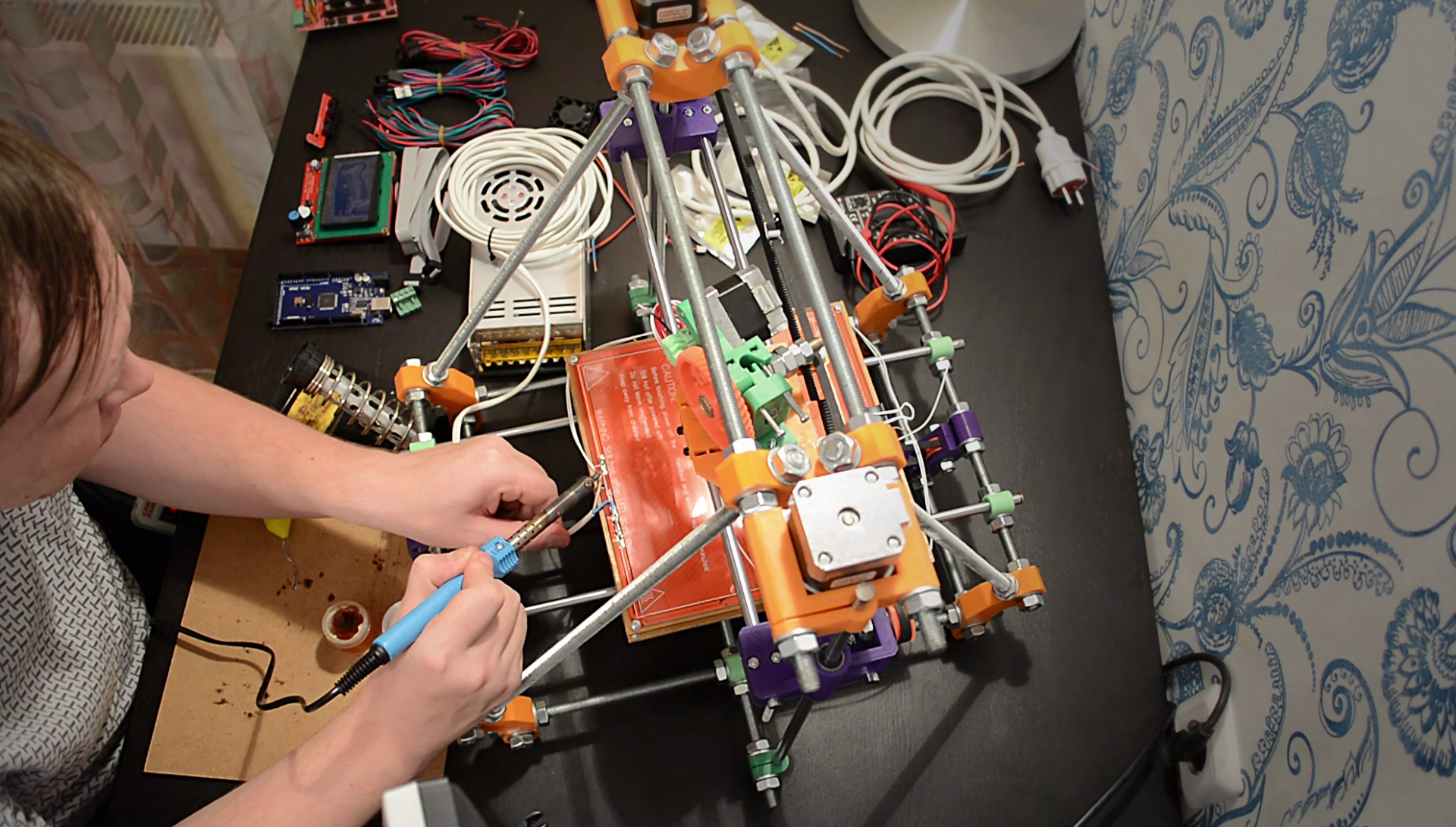
Теперь припаиваем к термистору провода с разъемами для удобства подключения их к Ramps.
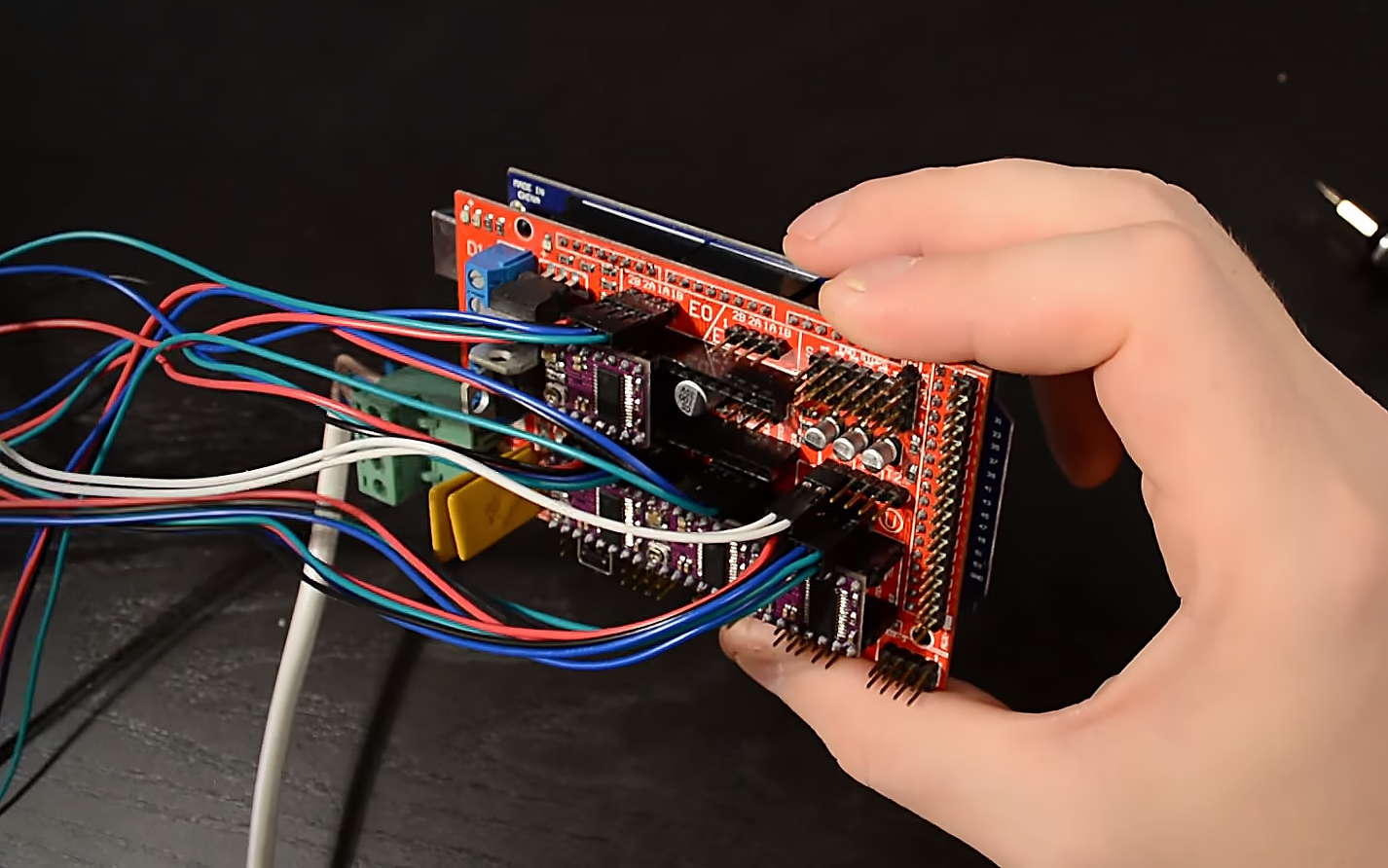
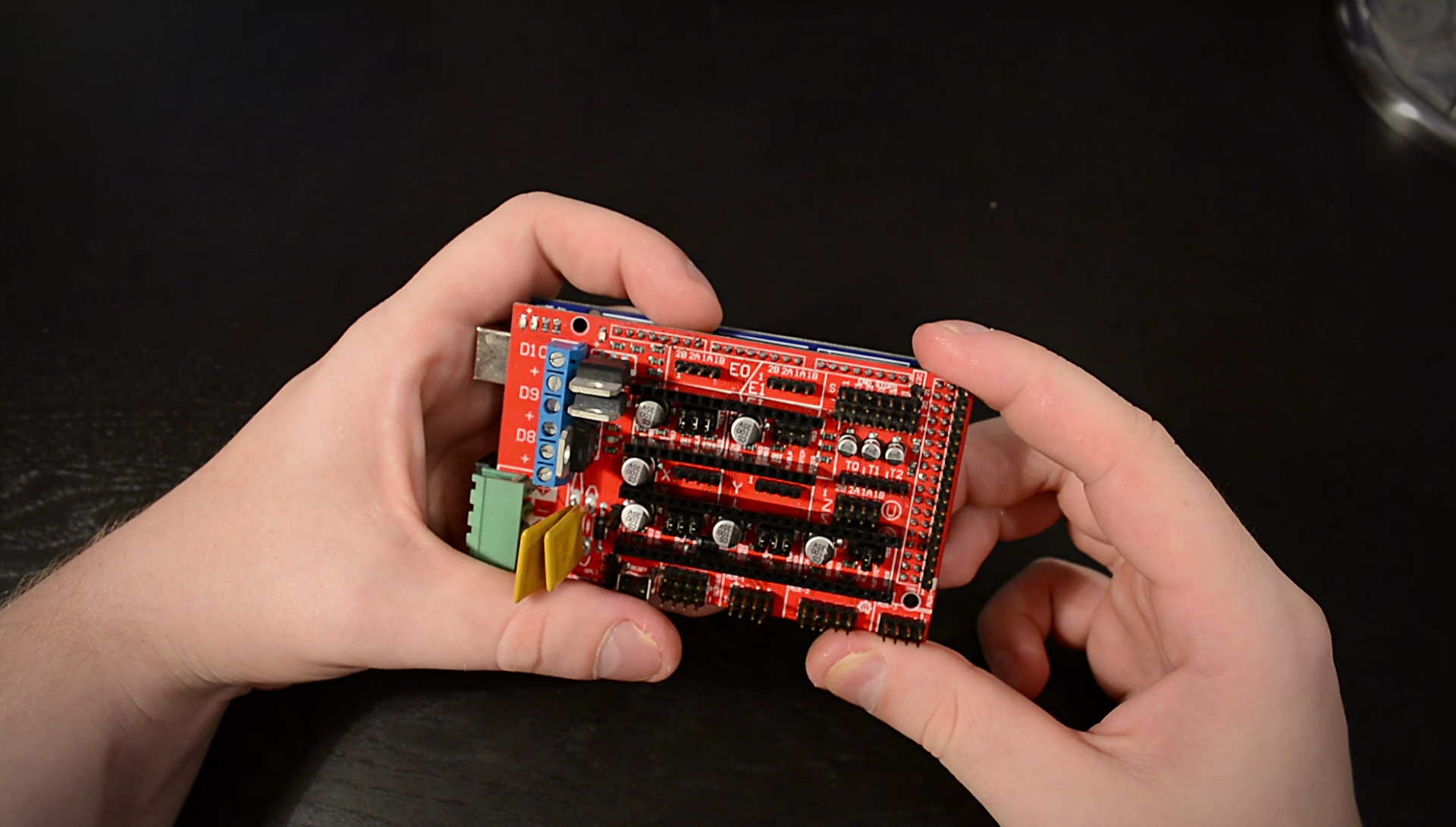
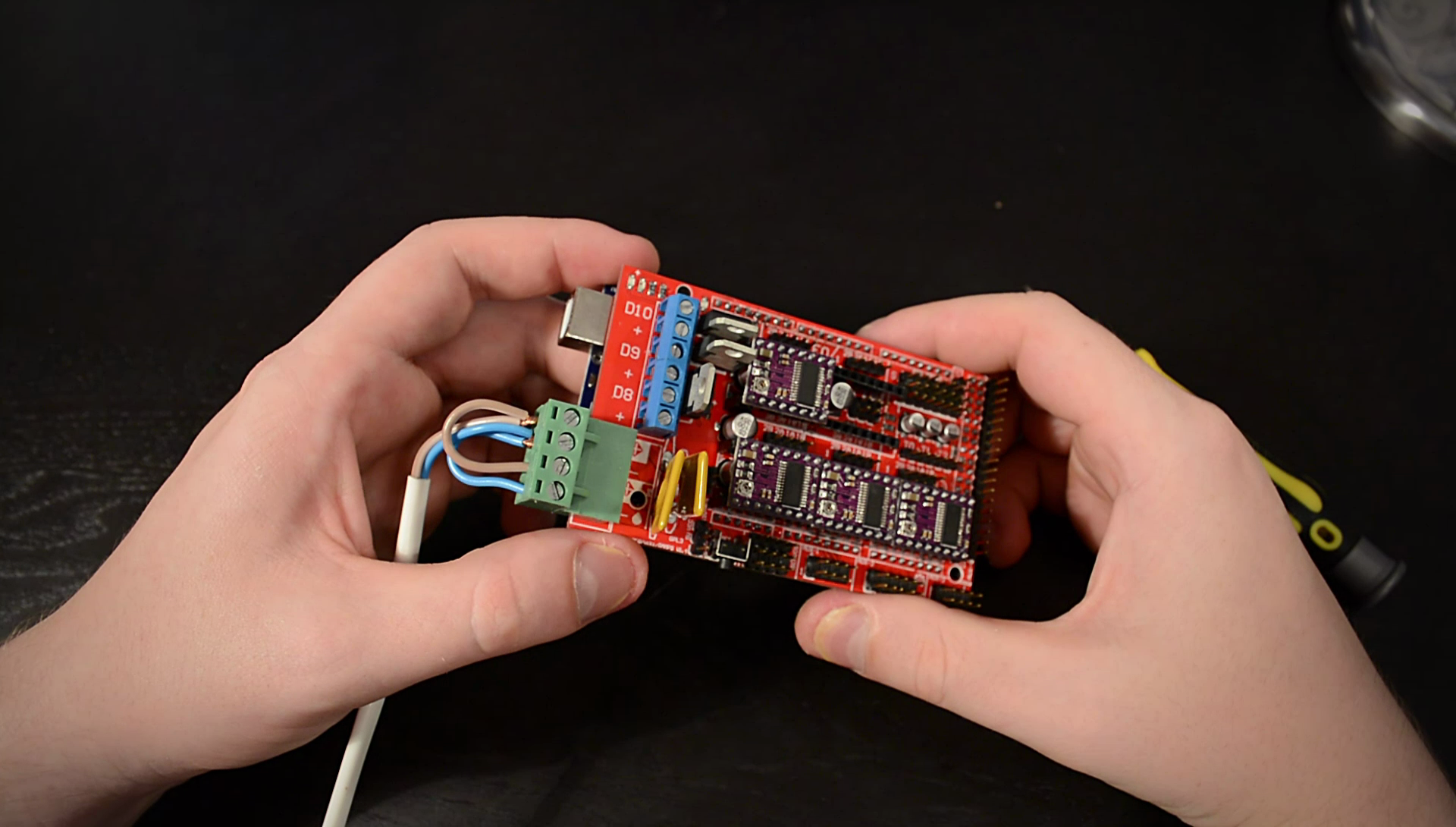
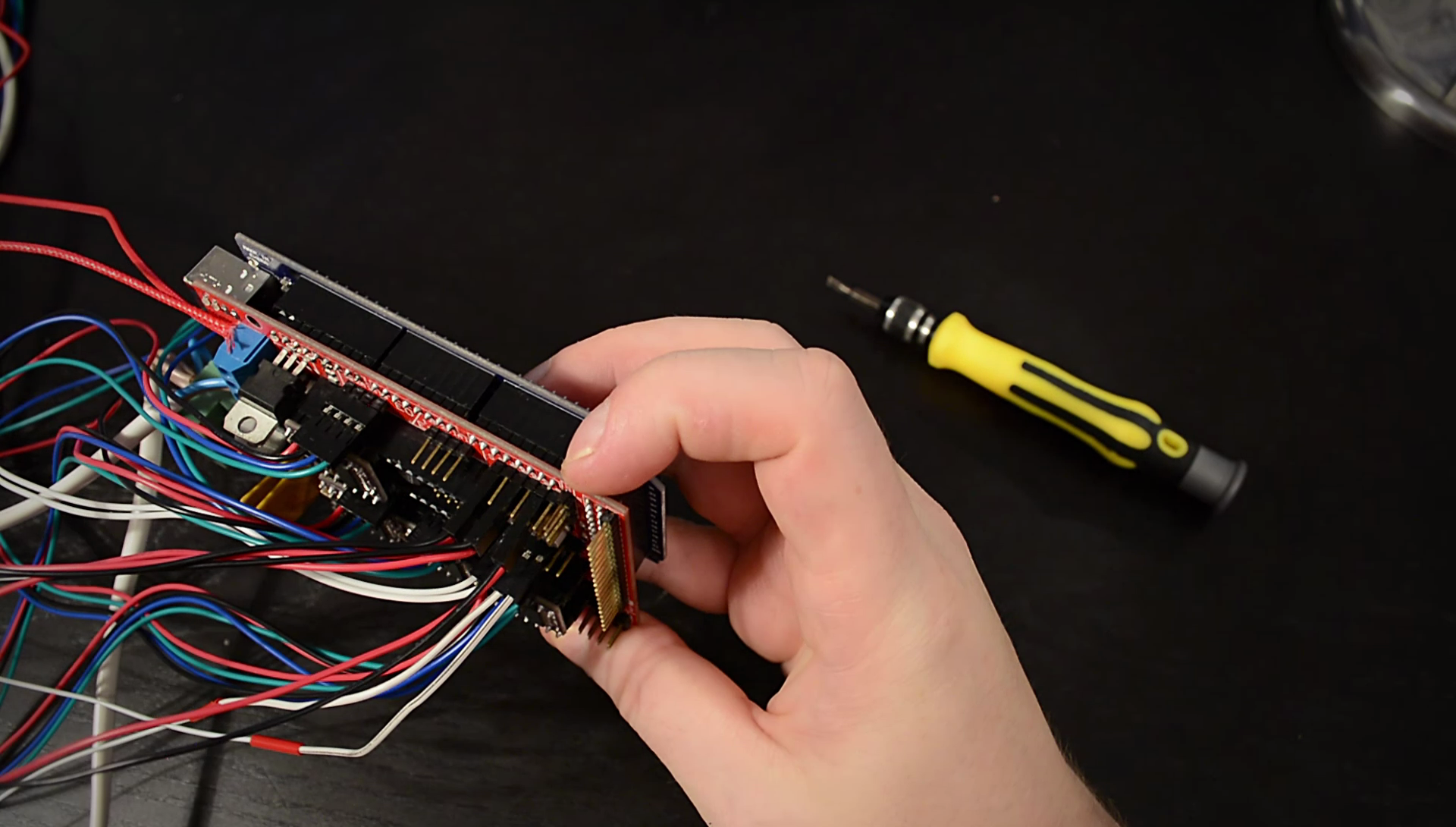
Далее соединяем Ramps с Arduino.
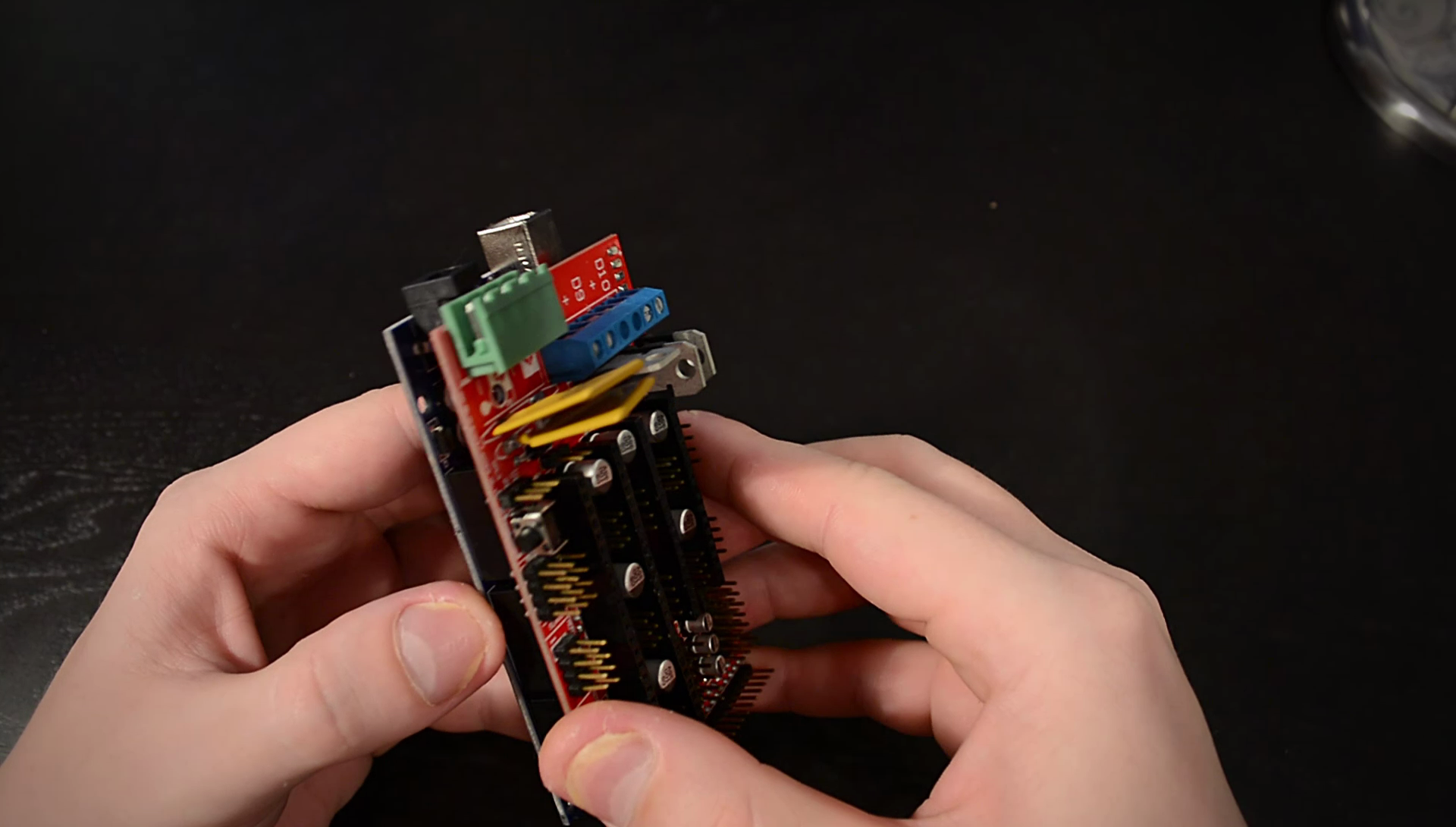
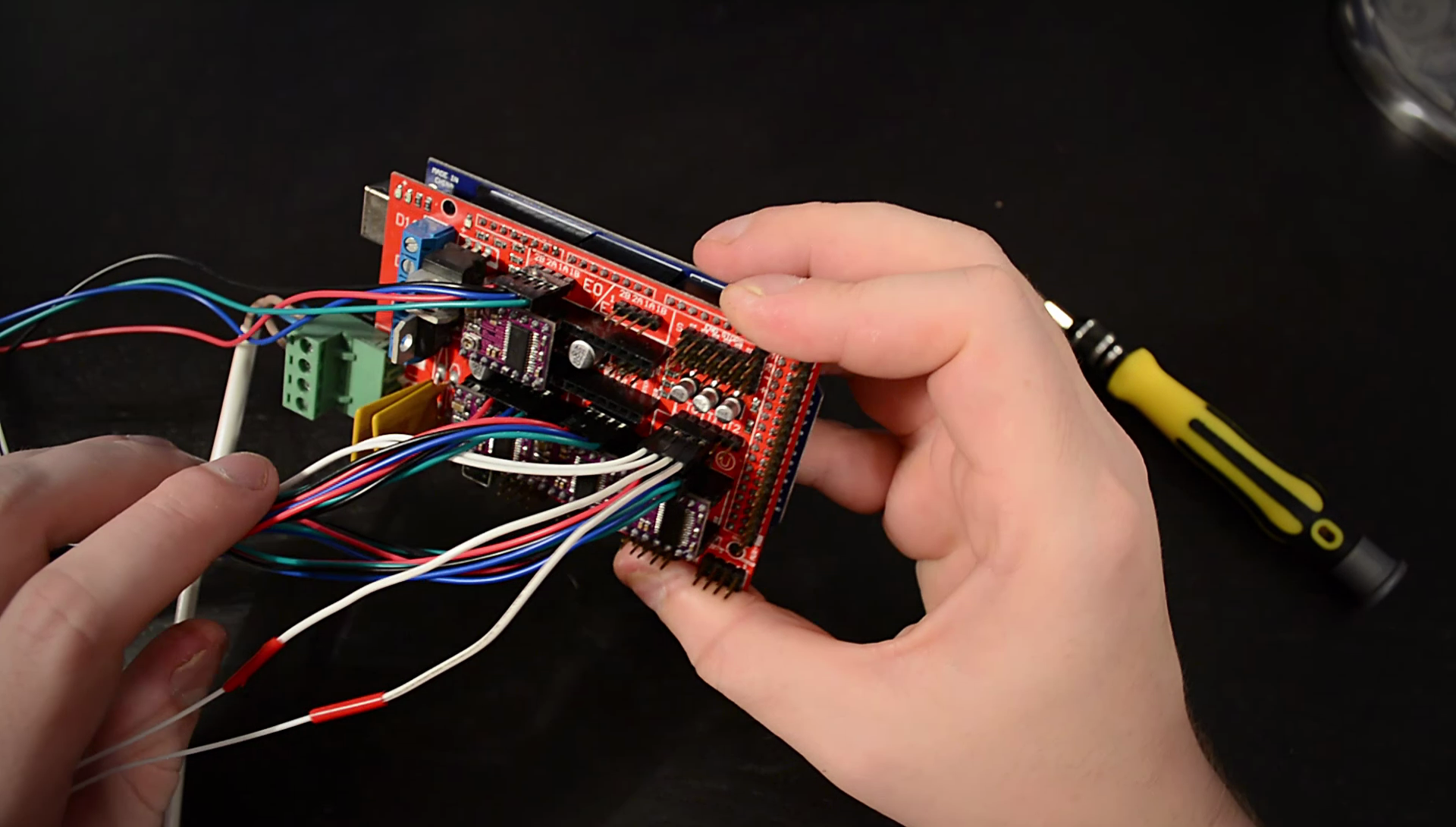
Теперь вставляем перемычки (джамперы) для деления шага. В экструдер, оси X и Y вставляем по три джампера. Так как используемые драйвера шаговых двигателей DRV8825, такое расположение джамперов будет означать деление шага на 32.
Для оси Z вставляем один джампер на вторую пару контактов для деления шага на 4.
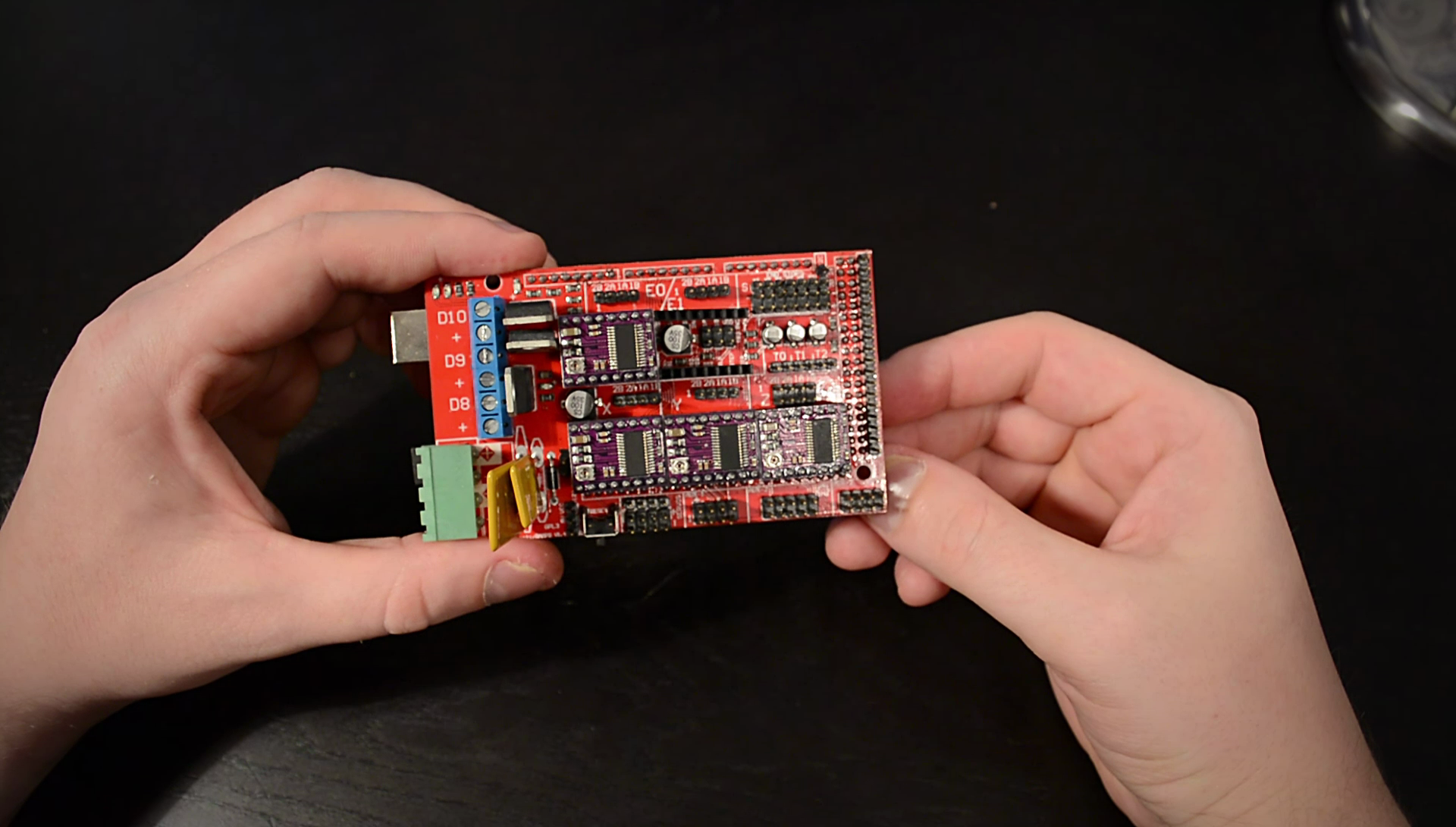
Устанавливаем драйверы шаговых двигателей. Драйверы DRV8825 устанавливаются переменным резистором в сторону подключения проводов питания.
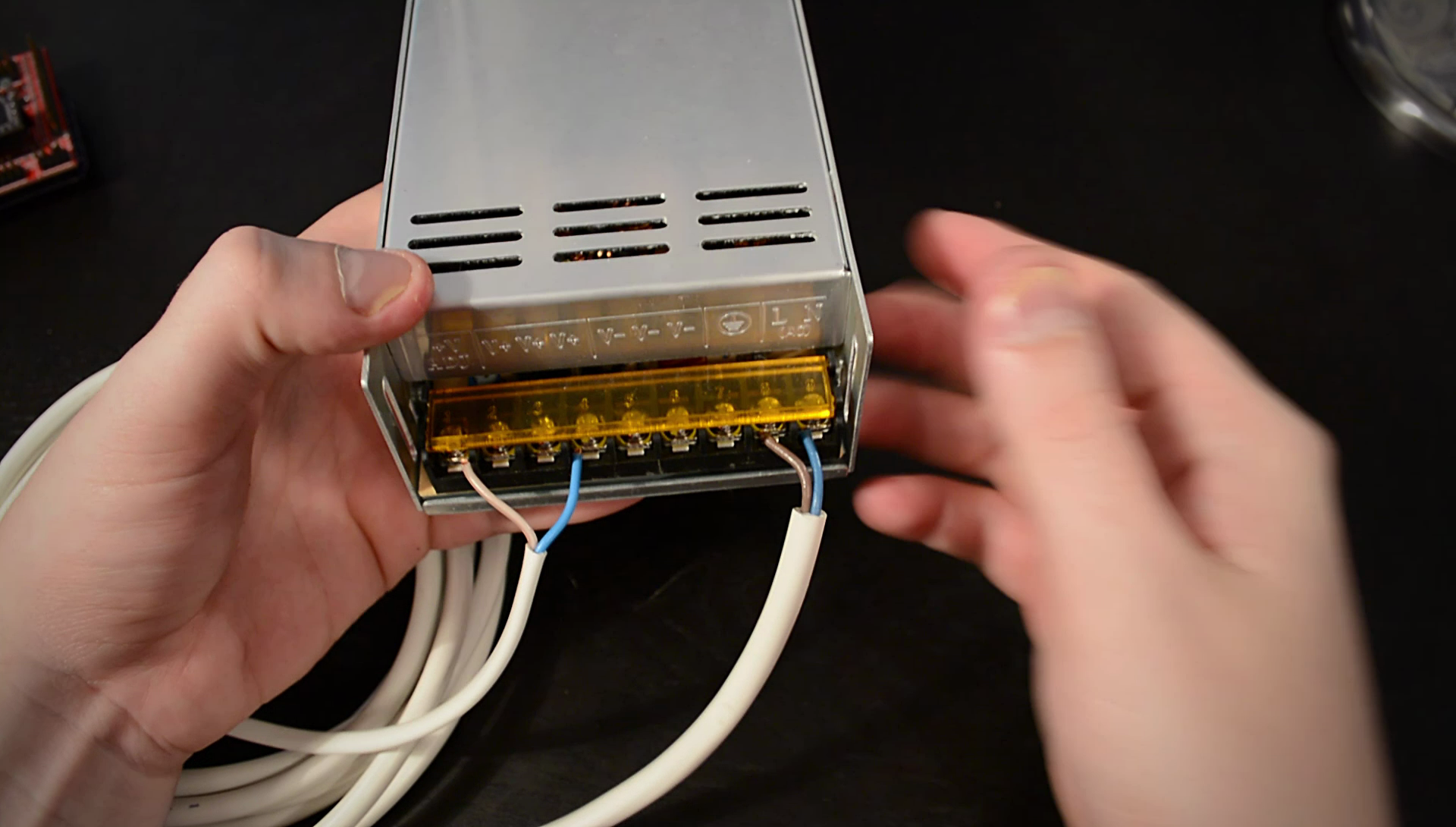
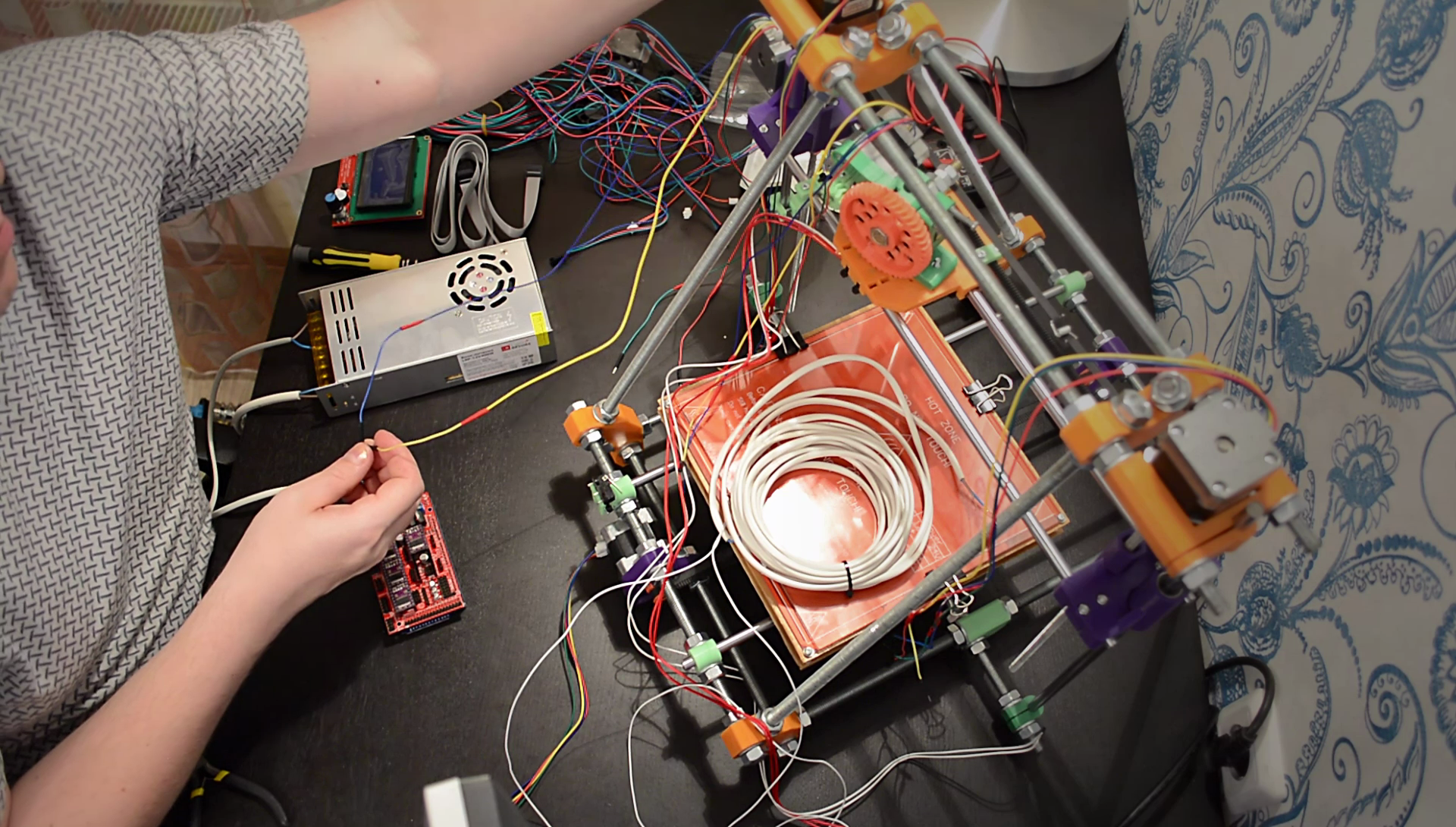
Теперь подключаем блок питания. Будем использовать импульсный блок питания 12V 400W. В колодке подключения в нашем случае первые три идут плюс, а вторые три – минус постоянного тока 12V. Затем идет земля и два зажима для подключения переменки 220V.

Первым делом подключаем провод питания с вилкой. Так как провод двух жильный, будем подключать без земли.

Далее подключаем провод питания Ramps. Его необходимо подключать в выход постоянного тока 12V.

Закрываем клеммы для безопасности и продолжаем.
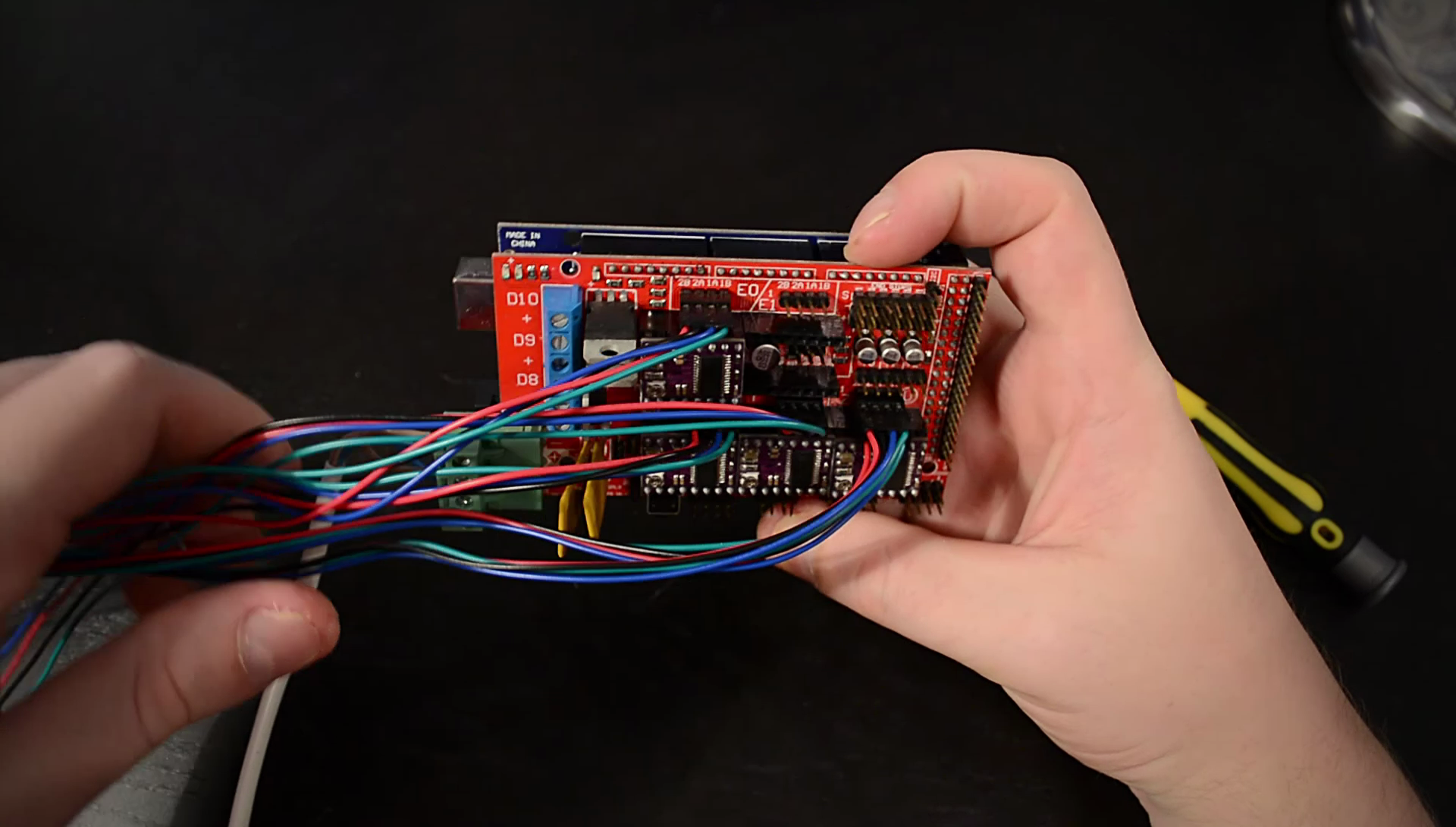
Теперь подключаем питание к самому Ramps. Вначале подключаем провода в верхние 11A входа, а от них уже в нижние 5A. Тут важно соблюдать полярность + и -.
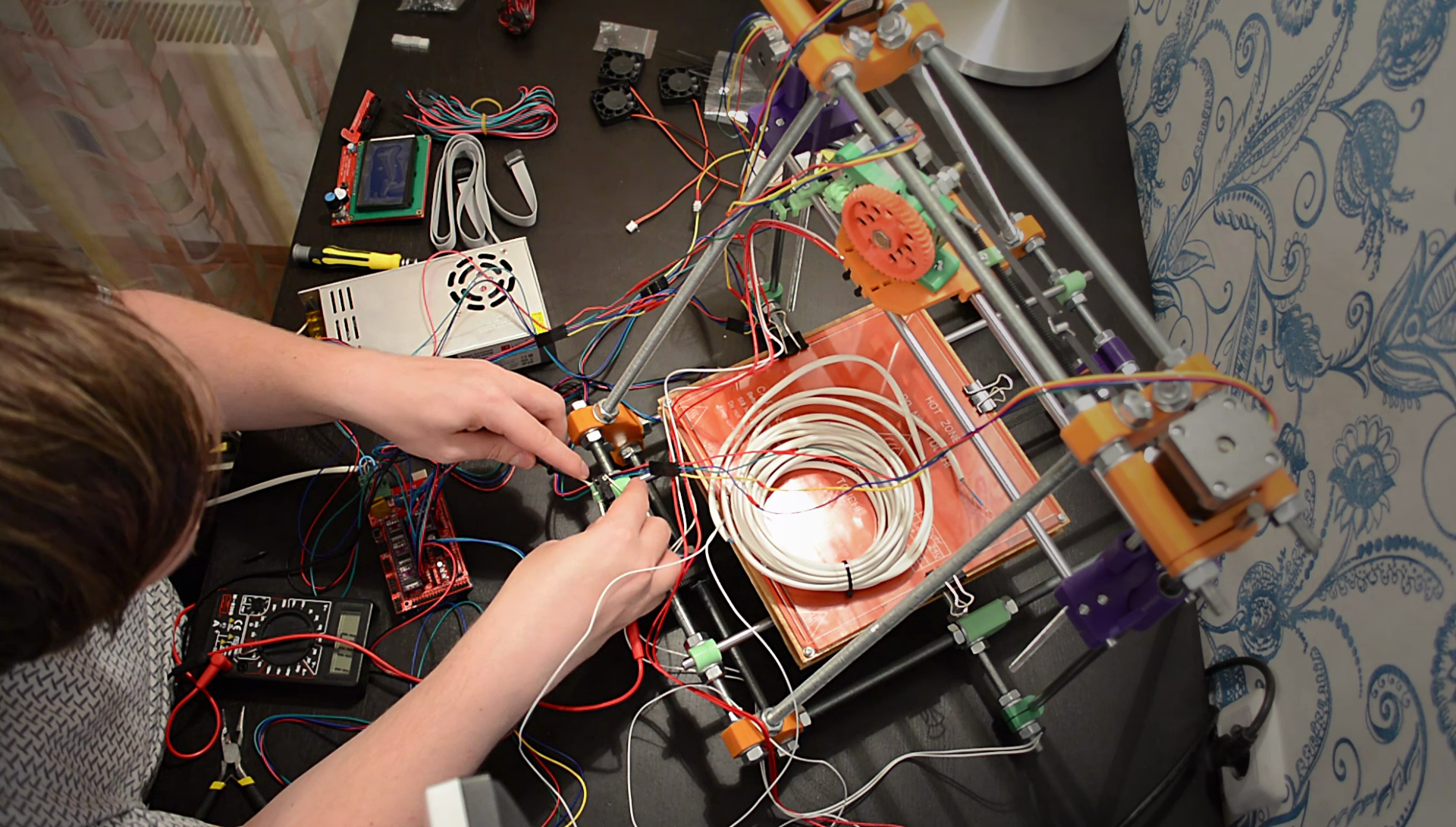
Подключаем провода в шаговые двигатели, а затем в Ramps.
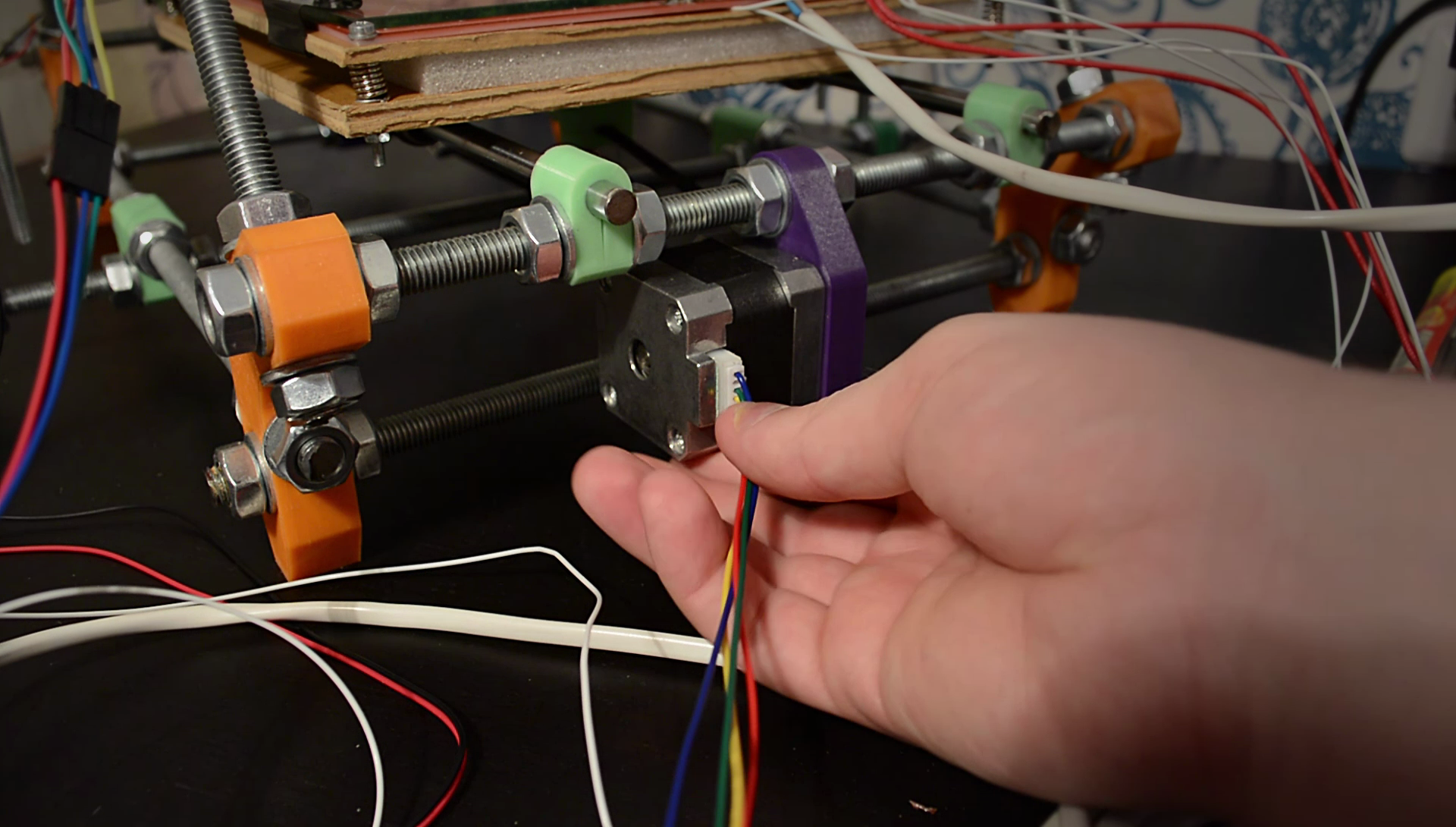
При подключении вначале должна идти одна обмотка, а затем другая. Самый простой способ определить обмотку – это замкнуть два провода, если при этом вал двигателя стал вращаться с большим усилием, значит обмотка найдена. А вторая обмотка – это оставшиеся два провода.
Далее подключаем термисторы. Вначале идет от HotEnd, а затем от нагреваемого стола.
Теперь подключаем провода нагревателя в клемму D10. Тут полярность не важна.
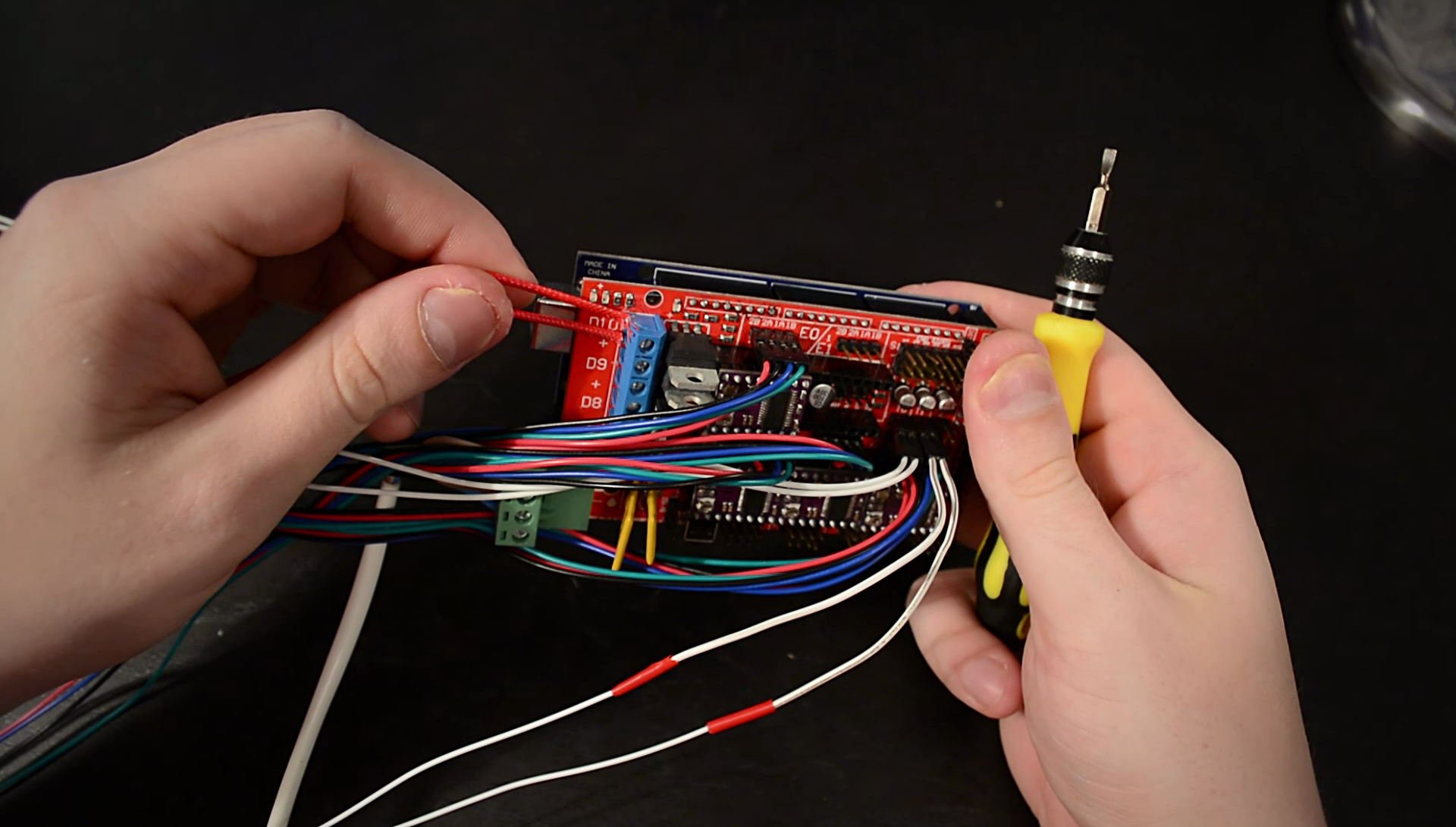
В клемму D8 подключаем нагреваемый стол.
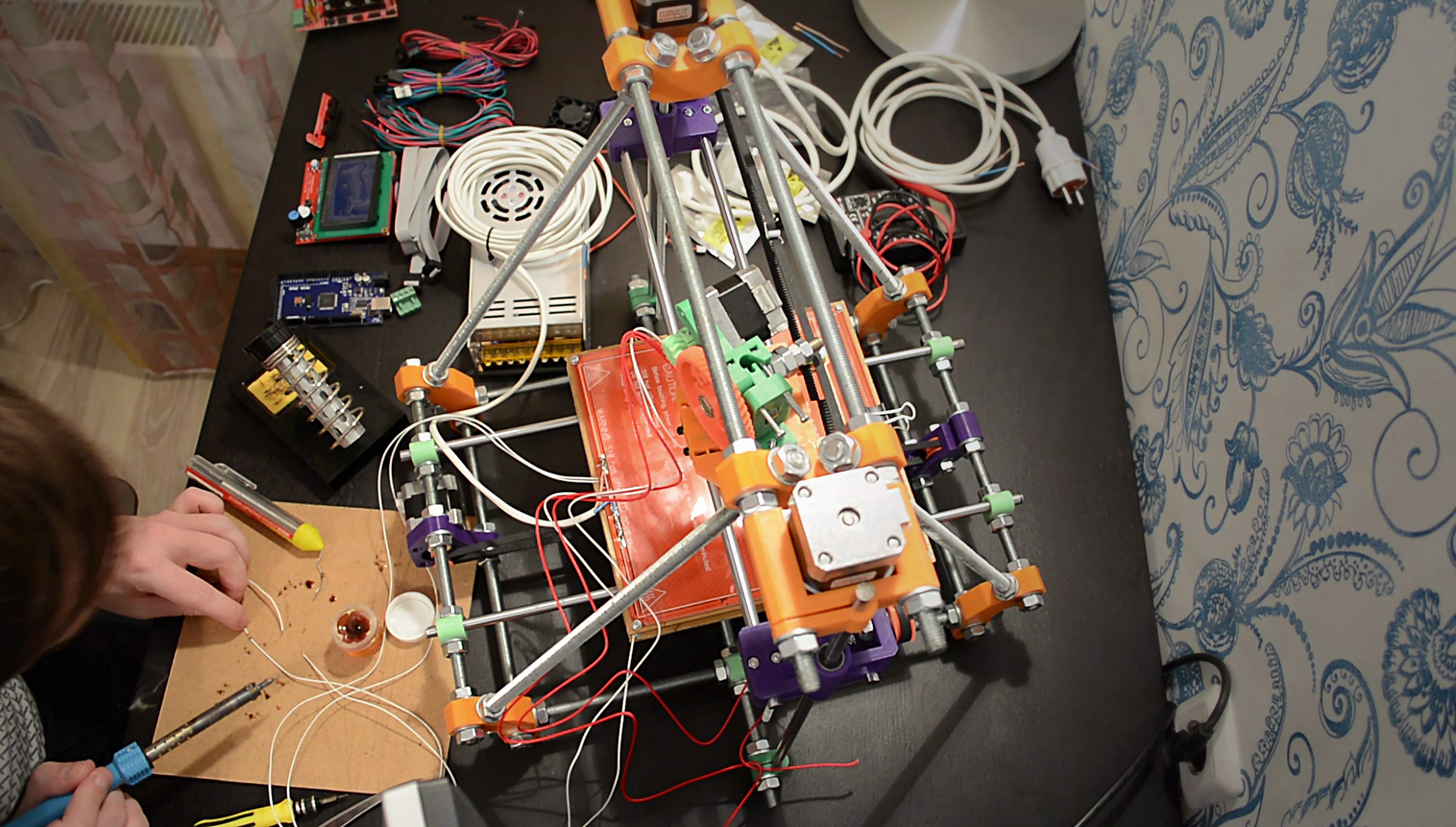
Подготавливаем концевики к установке, вначале мультиметром определяем выводы для подключения кнопки как нормально разомкнутая. Это первый и третий выводы.
Вначале залуживаем выводы и припаиваем провода с коннекторами.
Затем устанавливаем и закрепляем концевики на места.
Приступаем к подключению концевиков к Ramps. Так как все концевики у нас механические и расположены в минимуме, подключаем их на верхние пары пинов. Первая пара – ось X, третья – ось Y, а пятая - ось Z.
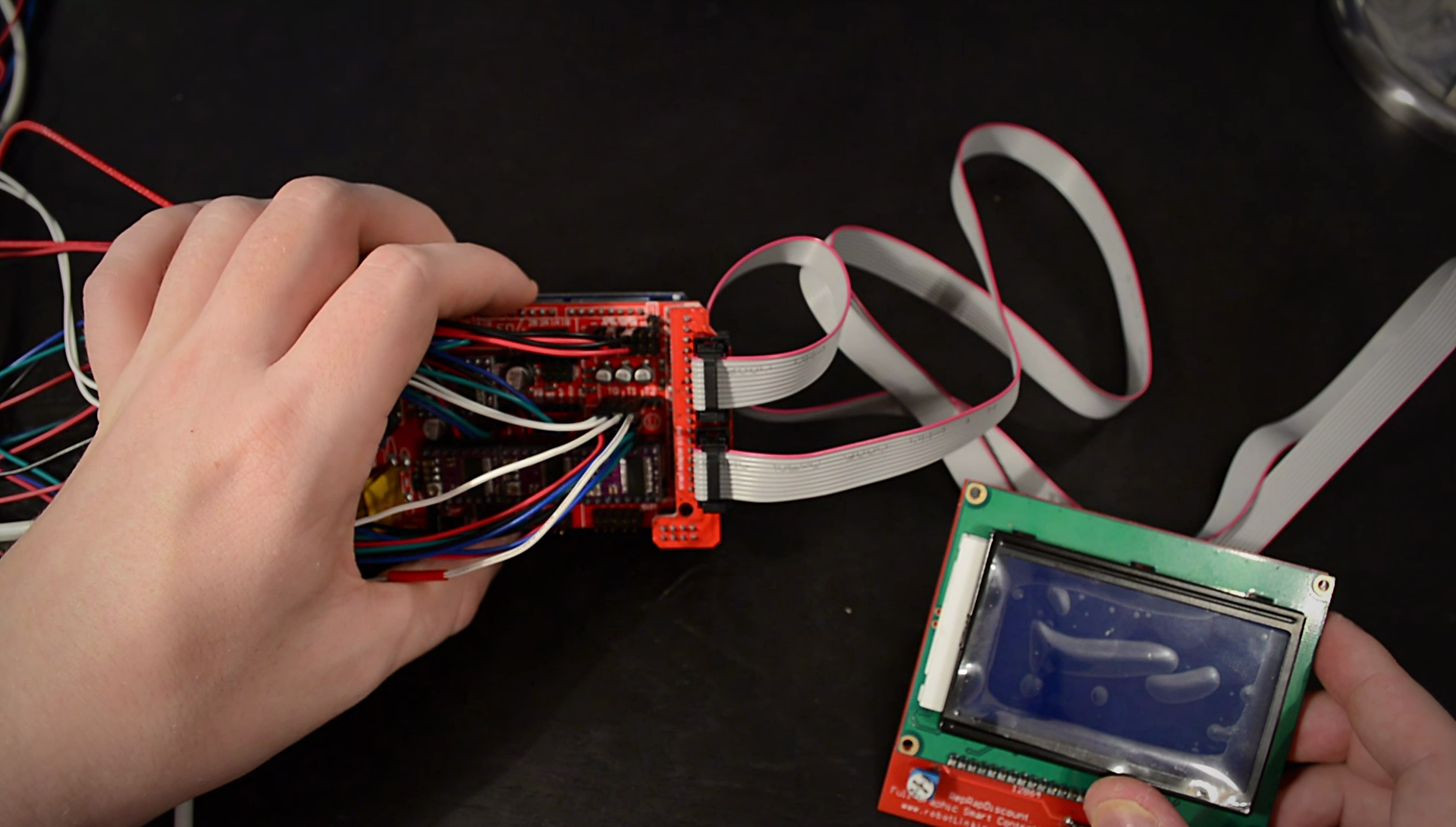
Теперь подключаем дисплей. Вначале устанавливаем в Ramps переходник для дисплея, а затем двумя шлейфами сам дисплей. Соблюдаем правильность подключения разъемов которые подписаны на дисплее и Ramps как Exp1 и Exp2.
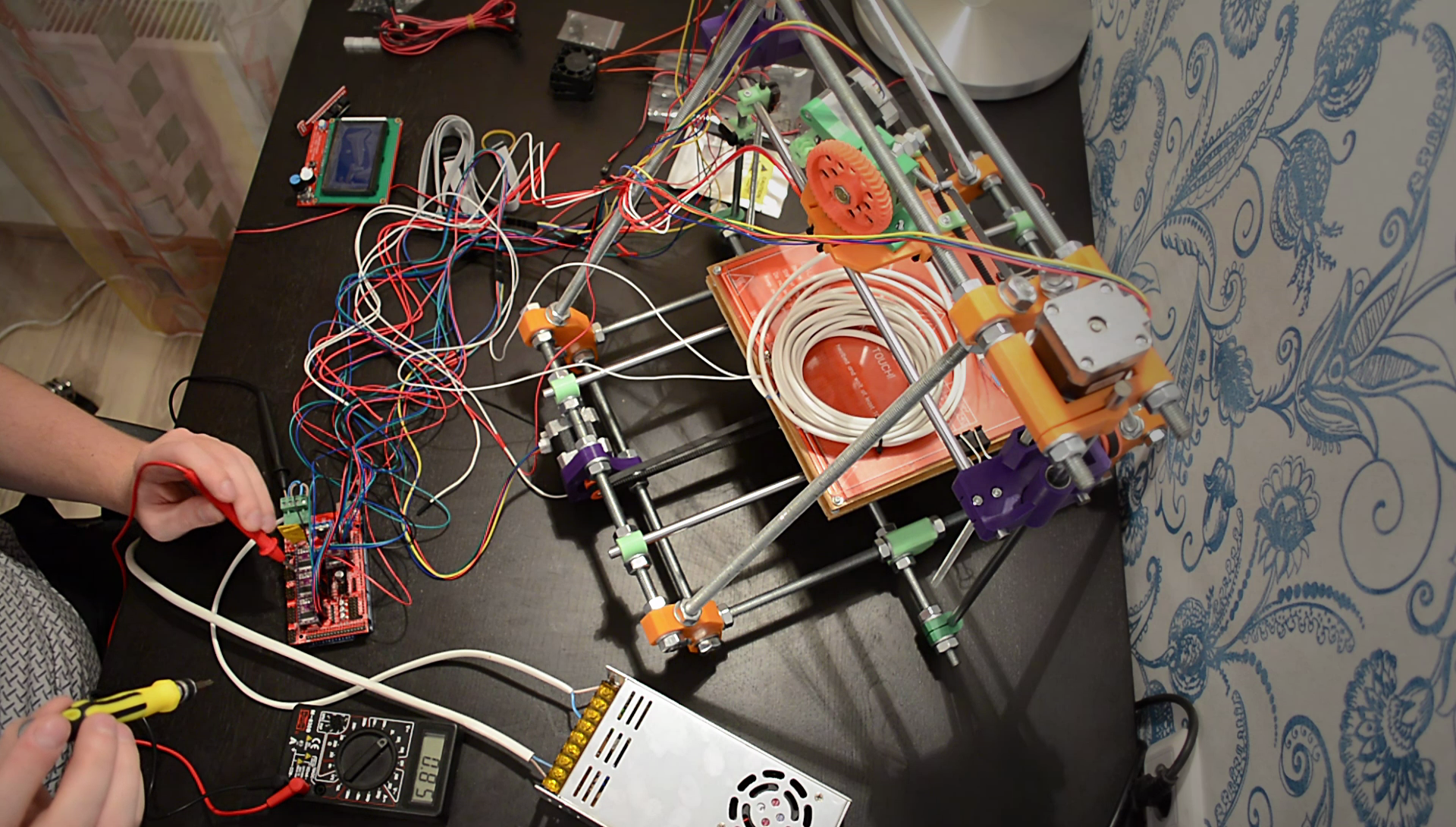
Теперь подаем на блок питания напряжение, подключив его в розетку и выставляем ток драйверов шаговых двигателей. Для драйвера DRV8825 и шагового двигателя 17HS4401 напряжение на пине Vref должно быть 0.85V.
Для замера напряжения Vref необходимо один щуп мультиметра подключить на минус питания, а второй к подстроечному резистору. И вращая резистор добиться необходимого тока.
После настройки незабываем отключить блок питания от сети.
На этом подключение электроники завершено. В следующей части займемся: конфигурированием прошивки, прошьем Arduino, откалибруем 3D принтер и распечатаем нашу с вами первую 3D модель.
Всем до встречи!